Predictive Control Methods
Predictive control methods use finite-horizon model-based predictions to compute an optimal control input. In particular, the minimizing input is computed based on an optimization problem, such that some user-specified cost function is minimized while satisfaction of safety-critical constraints is ensured. Model predictive control (MPC) is an optimization-based control method that generates feedback by repeatedly solving such predictive control problems and applying the initial part of the resulting optimal input sequence.
We are specifically interested in MPC due to its unique ability to guarantee the satisfaction of safety-critical constraints for general nonlinear systems. Our research focuses on extending this safe-by-design property to consider uncertain systems, to account for limited computational resources, and also transfer this safety property to reinforcement learning algorithms.
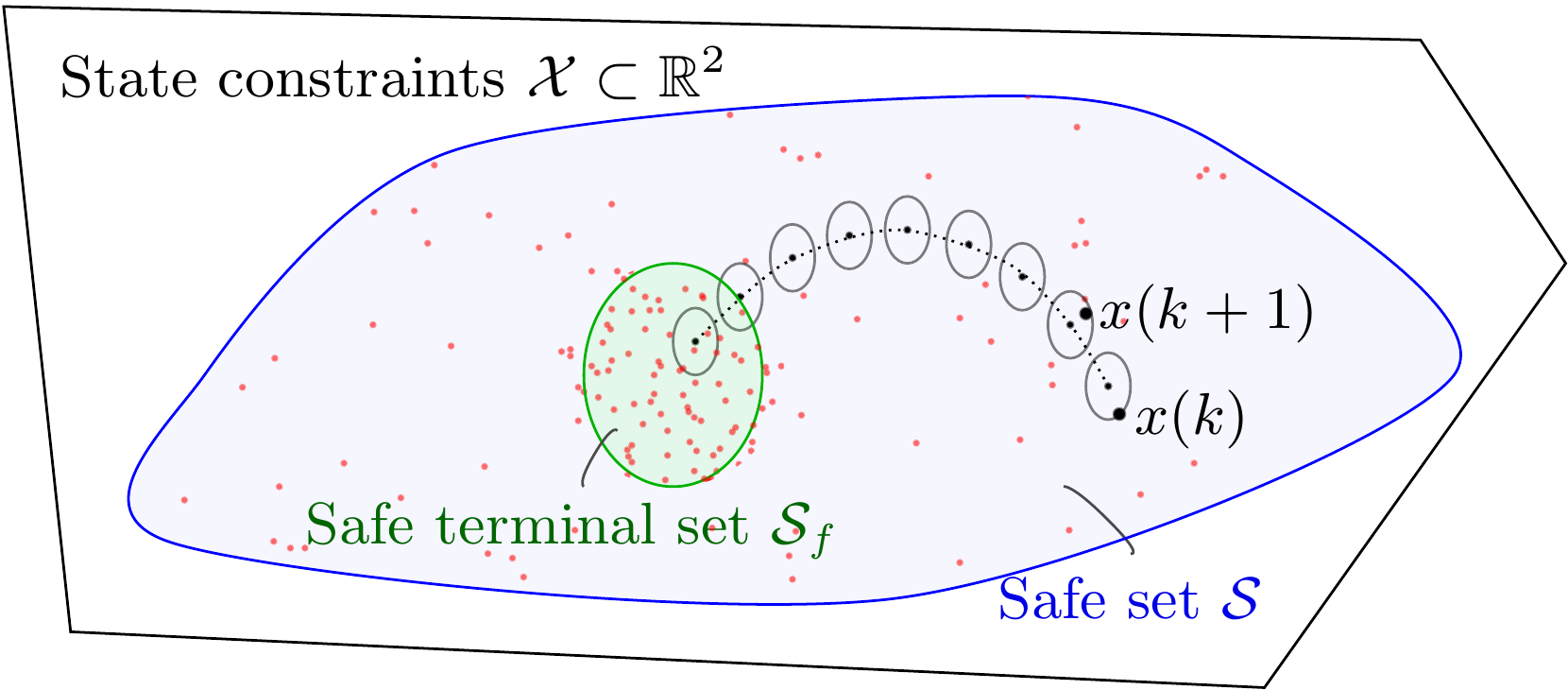
Model uncertainty in predictive control
In practice, the model used for predictive control is typically affected by uncertainty and the identified model is potentially biased. Therefore, the model uncertainty needs to be taken into account when designing a predictive control method in order to retain the safe-by-design property of model predictive control (MPC).
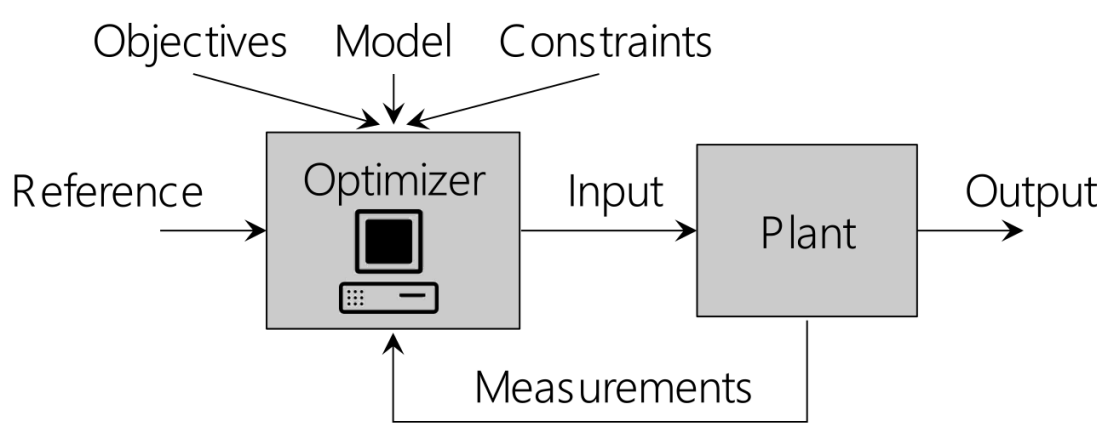
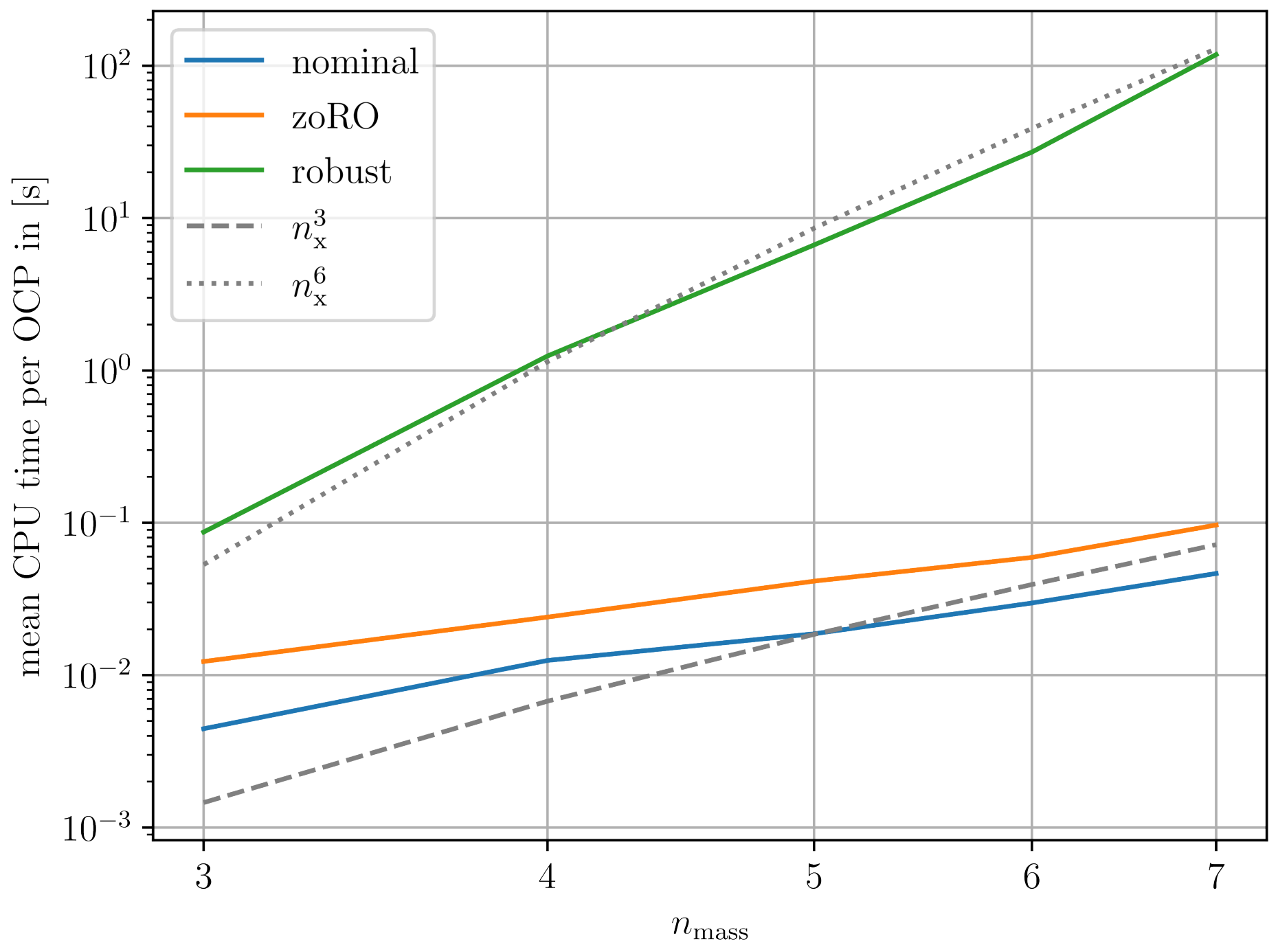
Numerical methods for predictive control
Model predictive control is an advanced optimization-based control strategy that greatly facilitates complex control design tasks involving, e.g., nonlinear and constrained systems, large-scale systems and systems affected by uncertainty. However, its effectiveness and generality comes at the cost of solving an instance of a parametric mathematical program at every sampling time. Especially for systems with fast dynamics or when limited computational resources are available, this poses a challenging task. For this reason, we develop efficient algorithms and software implementations that allow one to speed up the computations and enable applicability of model predictive control to an increasingly large class of systems and control problems.
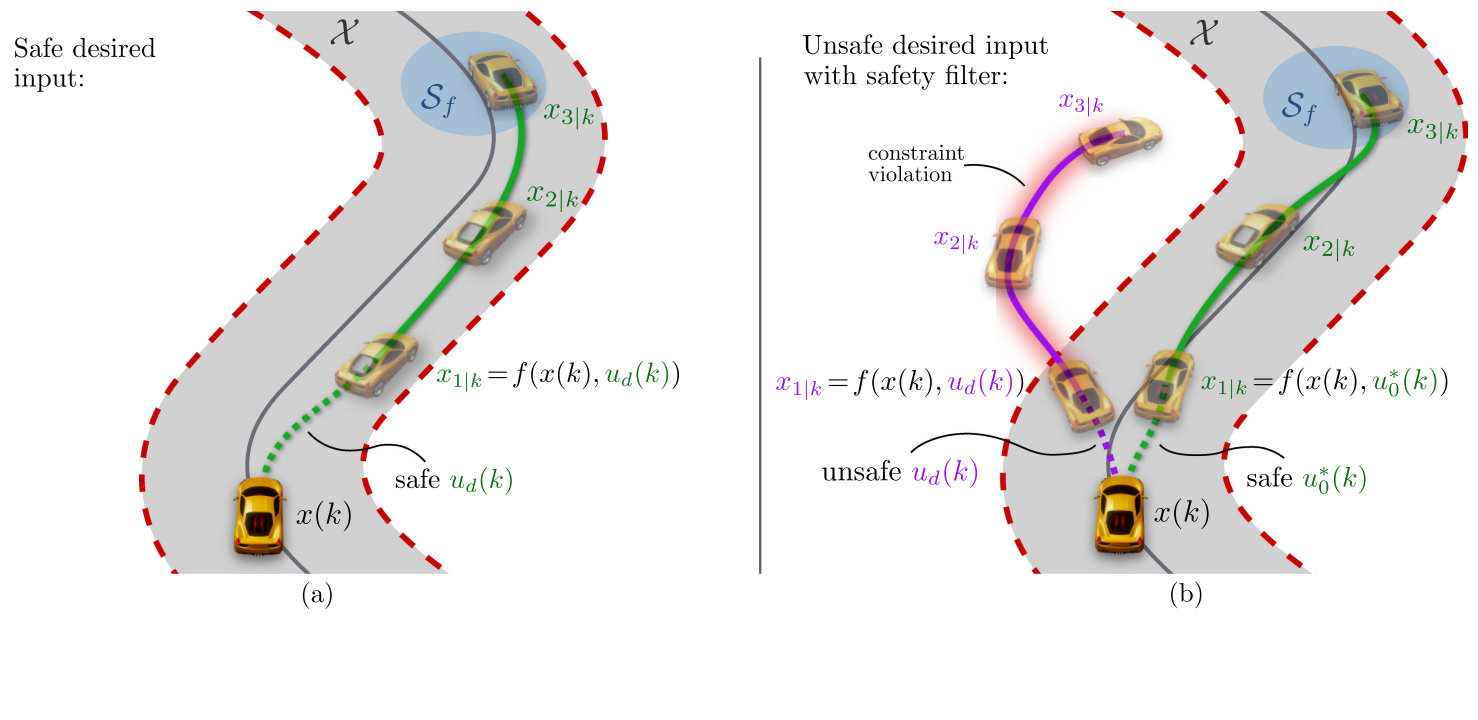
Predictive safety filter
Predictive safety filters enable the modularization of safety and performance in control design. Applications include the safe application of learning-based controllers, for example, imitation learning for autonomous driving applications, which then allows to safely reproduce a human driver behavior based on available data.