Laboratory Practice (Messlabor)
Experiments
For detailed description click on the experiments:

Script
Individual handouts for each of the experiments.
Laboratory
4 hours per week for 12 weeks.
A total of ten experiments in the following areas are required:
- Physics (at least four)
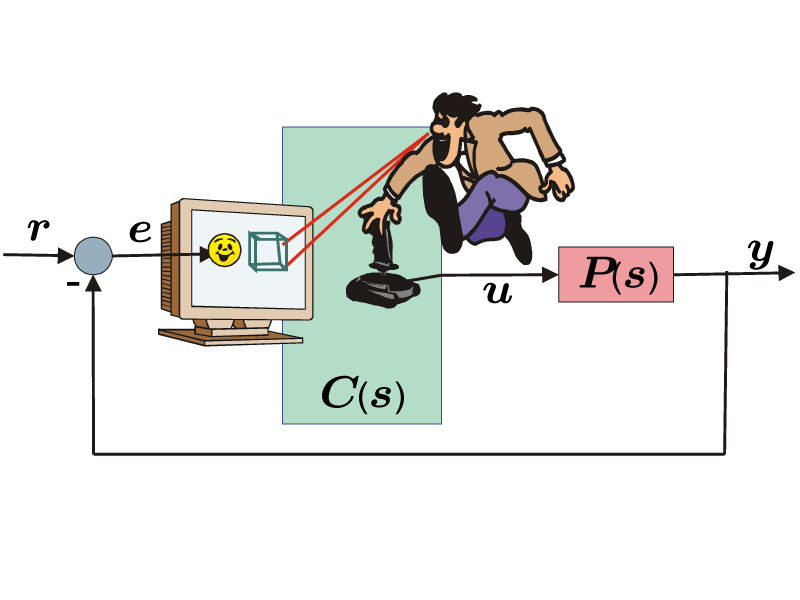
- Control (see above)
- Electronics
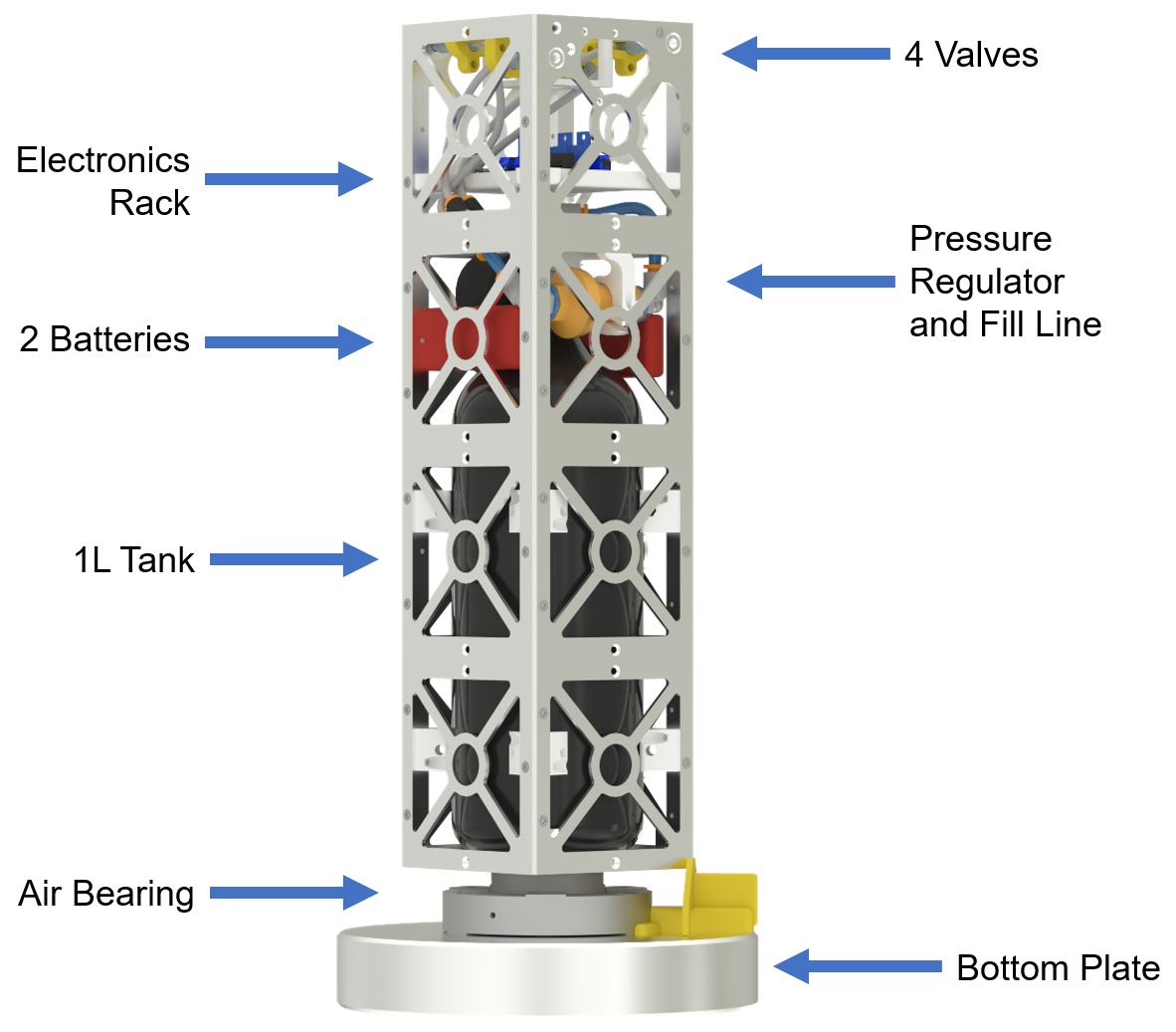
- Energy systems
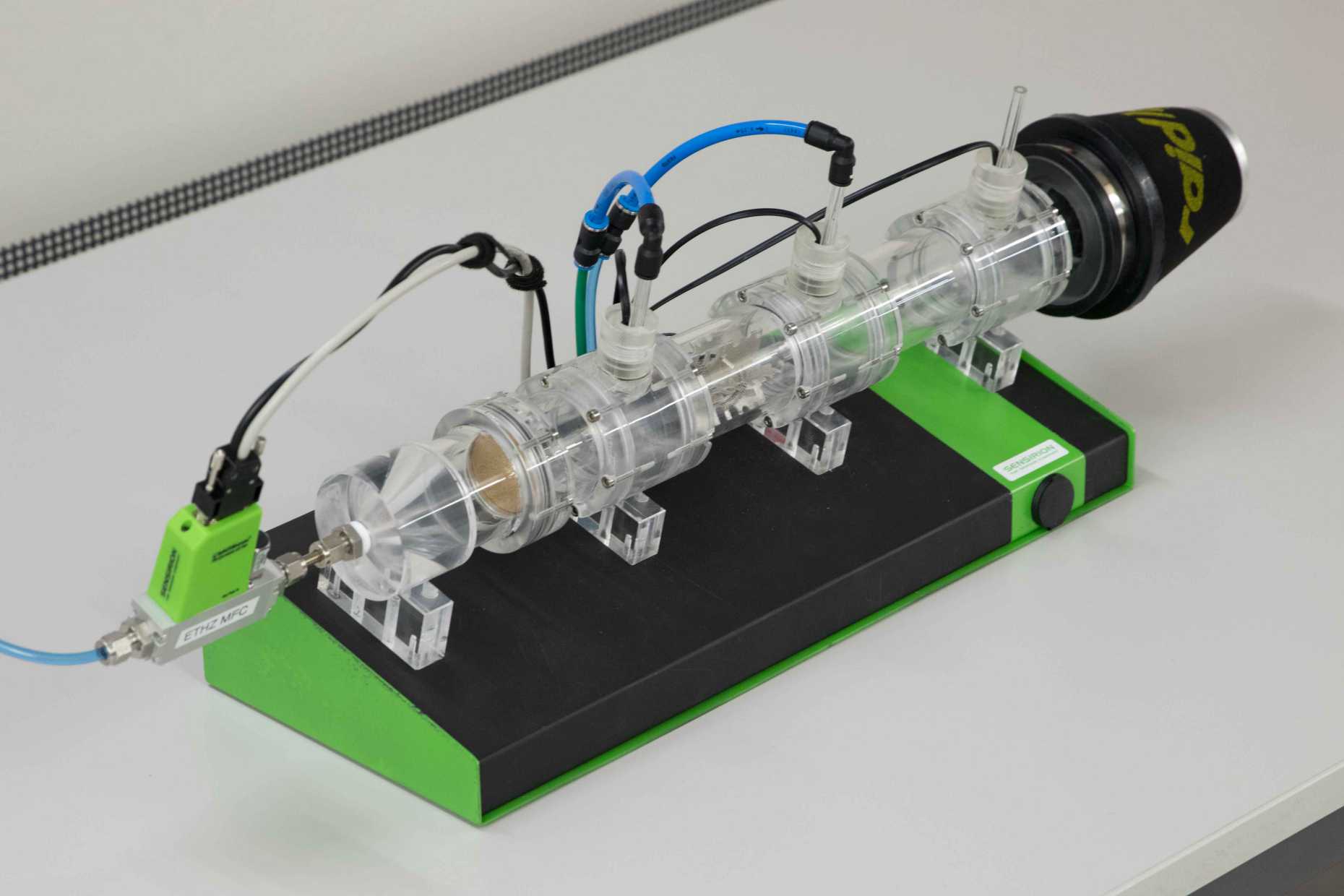
- Fluid dynamics
- Mechanics
- Process engineering