Game-theoretical Motion Planning - Tutorial ICRA '21
The Download Monograph (PDF, 16.5 MB) is now available online!
Tutorial info:
- When: 31st of May at 13:50 UTC (see the Schedule below for more details)
- Where: Via zoom at external page this link for all the talks
- Where (2): external page Gathertown for breaks, final discussion, and more
- Registration: external page https://forms.gle/3WP9c9uFMsXsJcev5
- Gdoc for Q&A: external page here
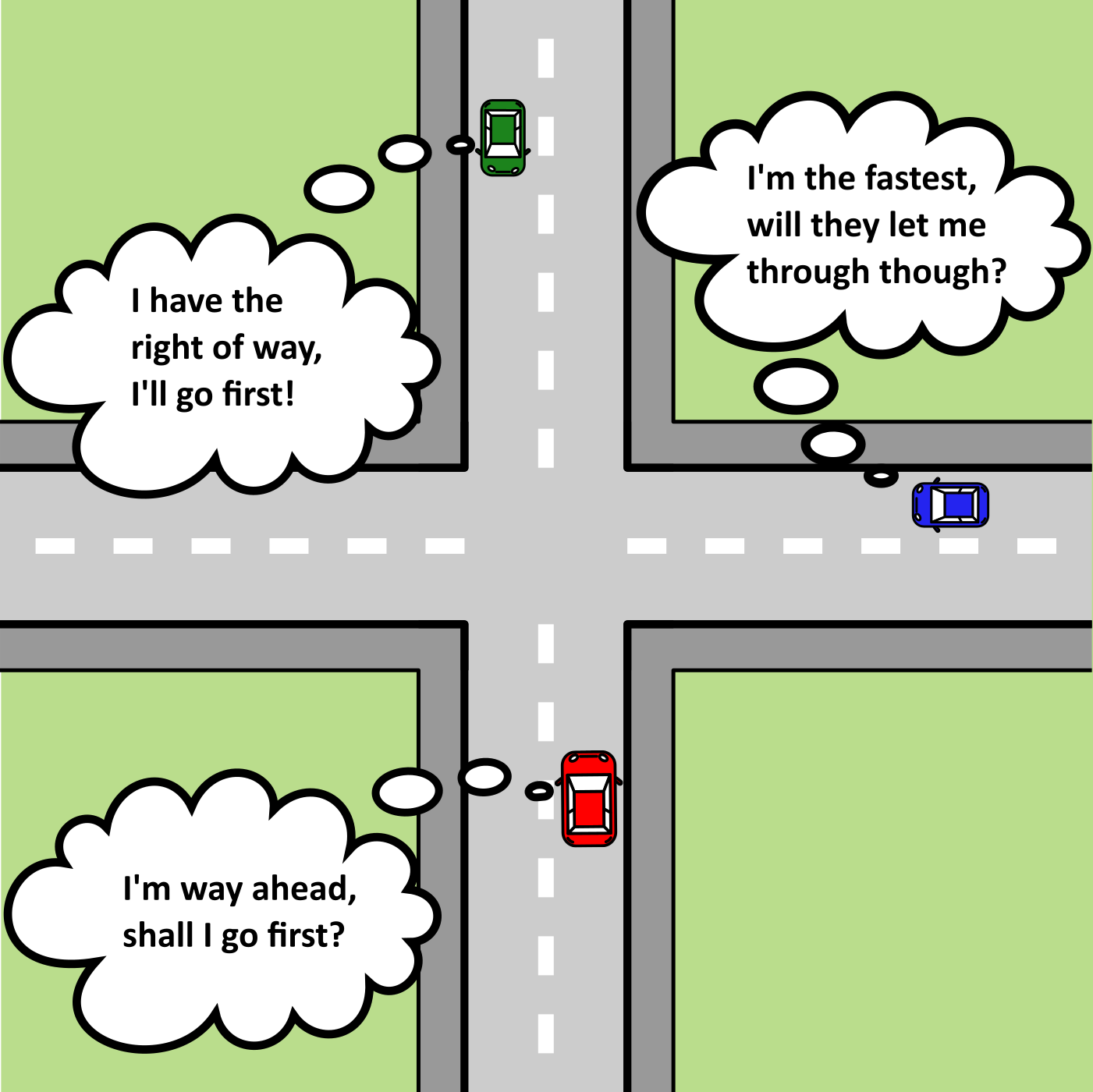
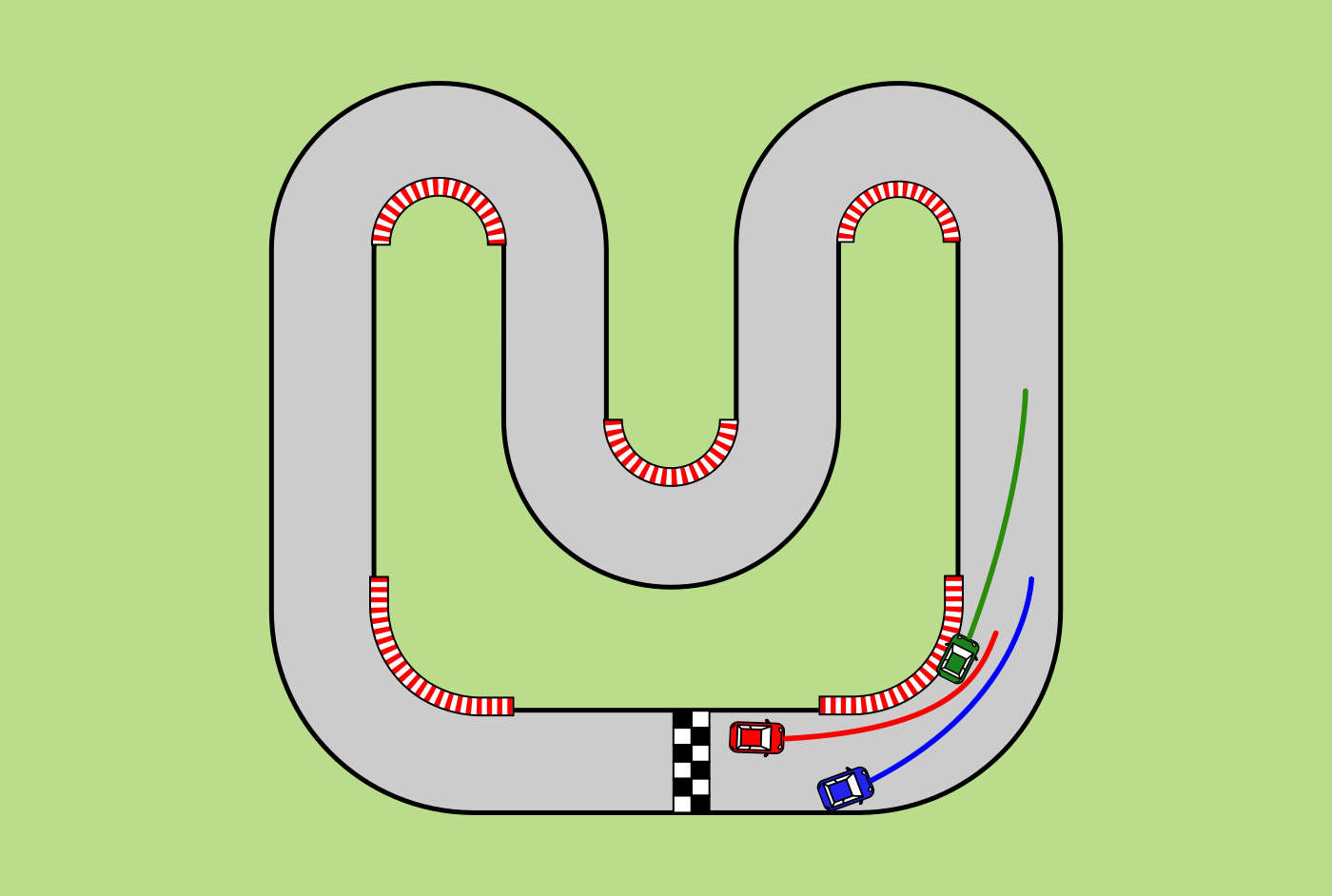
Why more game theory is needed in robotics?
Game-theoretic methods are useful for both competitive settings like racing as well as for non-competitive settings like urban driving.
We live in a decade where robots are leaving the factory floors for a more complex world with heterogeneous agents which require a rational and systematic way of interacting.
The current progress in innovative applications of robotics such as drone delivery or autonomous driving has highlighted the importance of a decision making process that accounts explicitly for others agents and the related uncertainties.
We do believe that an advisable future is one where autonomous agents take rational decisions in full awarness of the risk the are undergoing.
Recorded talks