Research Projects
Research in our group can be roughly divided into the following areas:
- Autonomy, with a special focus on self-driving cars;
- Mobility and transportation systems;
- Theoretical foundations in systems, perception and control.
A brief description of these areas with some of the ongoing research projects follows.
1. Autonomy and self-driving cars
The goal of this research effort is to enable vehicles such as cars and airplanes to safely and reliably drive/fly themselves in an uncertain, dynamic world (public roads, national airspace).
Gokart platform
Part of the research is carried out on our go-kart platform which allows to benchmark algorithms beyond the common safety measures imposed by public roads. See additional info here.

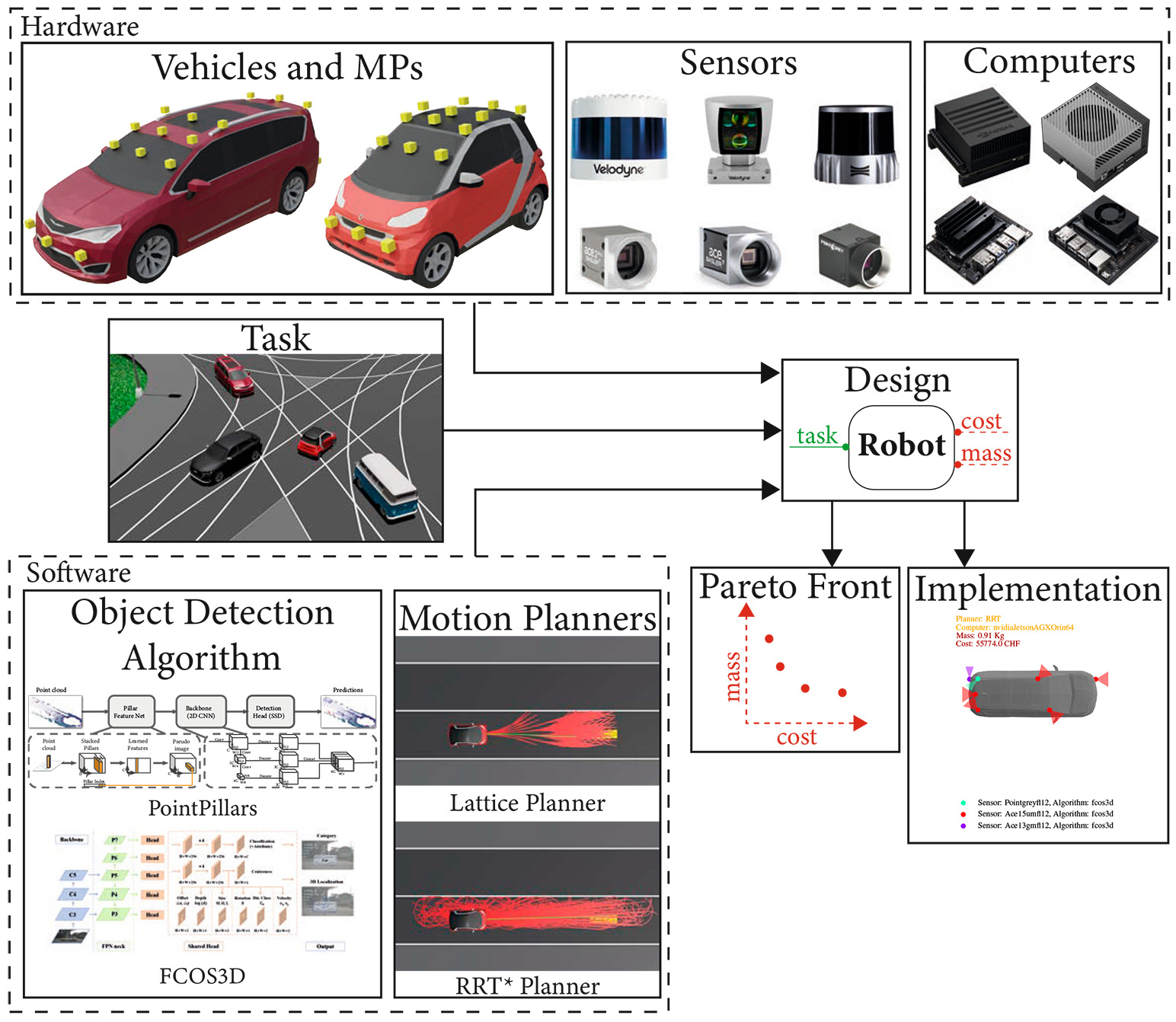
Co-design of Embodied Intelligence
Designing embodied intelligence systems requires integrating diverse hardware and software components while avoiding excessive complexity. The goal is to ensure safety and efficiency while minimizing resources such as cost, energy, computational demands, and weight, all while considering system interactions. Our research focuses on addressing these integration challenges and strategies, emphasizing task-driven, optimal hardware and software selection to achieve a balance between safety, efficiency, and resource conservation.
Please contact for more information.

Motion planning and decision making
Real-time algorithms for control in a complex environment, shared with human and robotic actors
Responsible Automation
As autonomous systems take on increasingly valuable and consequential tasks in daily life, it becomes essential to describe how these systems should behave and to ensure that they behave accordingly. At the same time, systems frequently lack the expressive capacity to encode behavioral specifications faithfully, leading to discrepancies between design intentions and real-world outcomes. In our work, we look to address responsibility in automation by providing expressive frameworks and tools that permit us to identify how agents should behave, how to ensure they are doing so, and the extent to which the system is robust to irrationality. For more information visit here.
Please contact or for more information.
Karma Economies: Coordination in Shared Infrastructures
As shared infrastructures like public roads and ports are increasingly used by autonomous vehicles, we face a critical challenge: How should agents coordinate their shared usage of these infrastructures in a fair and efficient manner? Since strict fairness is often impossible in a single instance of conflicting interests between agents, we developed a closed economic system called Karma Economy to let agents express their time-varying needs and to ensure fairness in the long-run.
Please contact or for more information.
2. Mobility and Transportation Systems
The goal of this research effort is to develop advanced control and optimization methods to enable new concepts for large-scale transportation systems.
Mobility on demand
Manage fleets of 100,000+ autonomous vehicles to provide on-demand mobility, trading off quality of service and operational costs.

Robustness and efficiency in large-scale systems
Design distributed control systems that provably maximize throughput, minimize delays, and increase resilience of transportation networks.

3. Theoretical foundations
There is nothing as practical as a good theory.
We support our applied research projects above by advancing the state of the art in foundational areas such as
- Control theory and Game theory
- Algorithmic robotics
- System design, optimization, and co-design
- Learning theory