Flying Platform
This is no longer an active project. For information please contact .
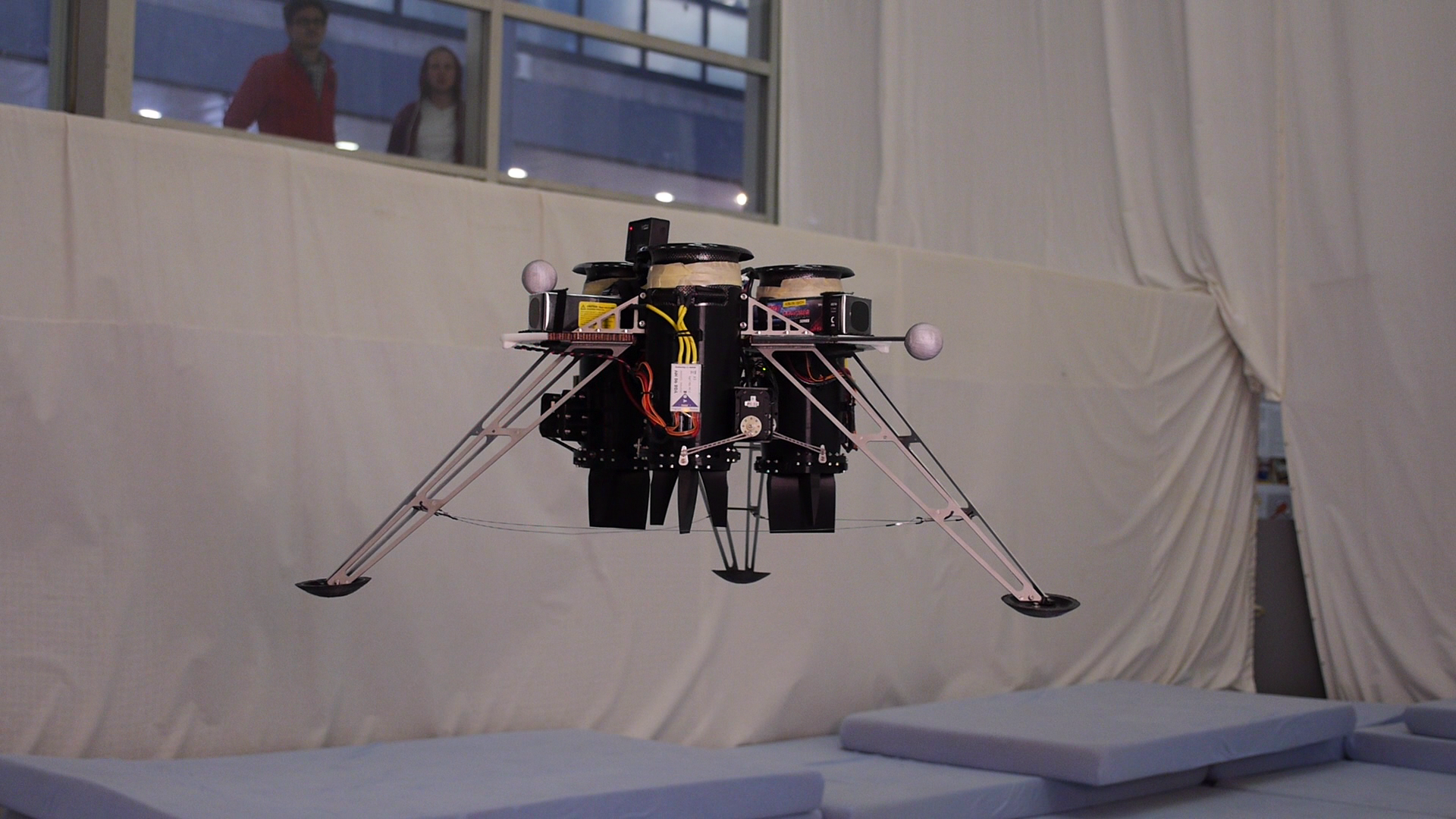
The Flying Platform is a flying machine developed at IDSC, ETH Zurich. Its purpose is to study the use of electric ducted fans as control and propulsion systems.
Background
The idea is to explore the use of ducted fans for joint control and propulsion, as a basic sub-system for flying machines. Ducted fans are useful for applications where size is limited and high static thrusts are required. Examples include aerial vehicles capable of VTOL, hovercrafts or even actuated wingsuit flight. Moreover, the high airflow velocities in ducted fans can be exploited for thrust vectoring.
Research on Control Algorithms
The Flying Platform is used for benchmarking novel control strategies that account for actuation limits. Control algorithms explicitly accounting for these limitation can provide larger stability margins and other performance enhancements. We are currently investigating model predictive control algorithms. The idea is to explicitly exploit the physical model of the system, including input and state constraints, for making model-based predictions. Since these methods are computationally expensive, we seek to trade off the prediction accuracy with computational cost and quantify the consequences of such approximations.
Moreover, in order to account for the unmodeled dynamics of the system and improve performance, we exploit iterative learning algorithms for trajectory tracking. In this way, the vehicle can cope with non-equilibrium motions and adapts to a changing environment.
Experiments are carried out in the external page flying machine arena.
Publications:
C. Sferrazza, M. Muehlebach, R. D'Andrea, "Trajectory Tracking and Iterative Learning on an Unmanned Aerial Vehicle using Parametrized Model Predictive Control", Proceedings of the Conference on Decision and Control, 2017, Download pdf (PDF, 753 KB)
M. Hofer, M. Muehlebach, R. D'Andrea, "Application of an Approximate Model Predictive Control Scheme on an Unmanned Aerial Vehicle", Proceedings of the International Conference on Robotics and Automation, 2016, Download pdf (PDF, 645 KB)
M. Muehlebach, R. D'Andrea, "Parametrized Infinite-Horizon Model Predictive Control for Linear Time-Invariant Systems with Input and State Constraints", Proceedings of the American Control Conference, 2016, Download pdf (PDF, 264 KB)