Theses & Semester Projects
How to apply:
- Please review the available projects below
- Send an email to the project contact.
Modeling and Control of an Ex-Vivo Perfusion Machine

The reintegration of individuals who have experienced accidents is at the heart of our efforts. A severe car accident or a workplace accident, can profoundly change a person's life. Such tragic events often result in serious injuries, such as severed limbs, and are classified as "polytrauma." At our lab, we are working to mitigate the consequences of such severe accidents. Using an innovative perfusion machine, we try to keep severed limbs alive outside the body for up to four days. This time window provides the foundation for successfully retransplanting the limb to a stabilized polytrauma patient.
Keywords
Mathematical modeling; Control; Biomedical; Optimization; Fluiddynamics
Labels
Master Thesis , ETH Zurich (ETHZ)
Description
During your project, you will develop a mathematical model of the perfusion machine, which will be used to test new control algorithms in simulation. In a first phase, you will focus on the fluid dynamic component of the machine, modeling flows and pressures along the pipes. To gather the necessary data for the parameter identification, you will run your own experiments on the perfusion machine testbench and get the opportunity to collaborate with an entire team of dedicated and experienced researchers from USZ and the IDSC group. The second phase of the project is the development of sophisticated model-based controllers. Specifically, your goal is to develop a MIMO controller for the pressure and flow at the organ’s connections.
Goal
Derive a mathematical model and a corresponding MIMO controller for the perfusion machine
Contact Details
Marc-Philippe Neumann, mneumann@idsc.mavt.ethz.ch Dr. David Machacek, davidm@ethz.ch
More information
Published since: 2025-03-28 , Earliest start: 2025-04-01 , Latest end: 2025-12-23
Applications limited to ETH Zurich
Organization Research Onder
Hosts Neumann Marc-Philippe
Topics Engineering and Technology
Differential Particle Simulation for Robotics
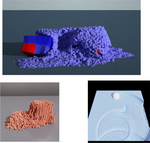
This project focuses on applying differential particle-based simulation to address challenges in simulating real-world robotic tasks involving interactions with fluids, granular materials, and soft objects. Leveraging the differentiability of simulations, the project aims to enhance simulation accuracy with limited real-world data and explore learning robotic control using first-order gradient information.
Labels
Semester Project , Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
This project is set to limited visibility by its publisher. To see the project description you need to log in at SiROP. Please follow these instructions:
- Click link "Open this project..." below.
- Log in to SiROP using your university login or create an account to see the details.
If your affiliation is not created automatically, please follow these instructions: http://bit.ly/sirop-affiliate
More information
Published since: 2025-03-10 , Earliest start: 2025-01-01 , Latest end: 2025-12-31
Applications limited to ETH Zurich , EPFL - Ecole Polytechnique Fédérale de Lausanne
Organization Robotic Systems Lab
Hosts Nan Fang , Ma Hao
Topics Engineering and Technology
Performance and sustainability assessment of an EV traction system

Design new control strategies to maximize efficiency as well as lifetime in BEVs.
Labels
Semester Project , Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
This project is set to limited visibility by its publisher. To see the project description you need to log in at SiROP. Please follow these instructions:
- Click link "Open this project..." below.
- Log in to SiROP using your university login or create an account to see the details.
If your affiliation is not created automatically, please follow these instructions: http://bit.ly/sirop-affiliate
More information
Published since: 2025-03-10 , Earliest start: 2025-01-01 , Latest end: 2025-12-01
Organization Research Frazzoli
Hosts Censi Andrea
Topics Engineering and Technology
Infrastructure Optimization for Bus Fleet Electrification

Development of an open-source Python toolbox for optimizing electric bus fleet electrification in Switzerland, focusing on charging infrastructure, battery sizing, and strategy. The next phase aims to enhance compatibility, expand charging options, integrate new energy sources, and improve computational efficiency in collaboration with PostAuto.
Keywords
Electric bus, fleet electrification, charging infrastructure, Dynamic programming
Labels
Master Thesis
Description
Several Swiss cities have committed to electrifying their entire bus fleets over the next few decades. In this process, many important decisions need to be made that can have a significant impact on the efficiency and cost of electrification, such as the choice of charging infrastructure or the size and type of batteries. In the ongoing Swiss EBus Plus project, we have therefore developed and published a Python-based open source toolbox for the simultaneous optimization of charging station placement, battery size, and charging strategy. 1 The next phase of this research aims to enhance the toolbox for broader applications. A close collaboration with PostAuto is particularly valuable, given their diverse operational profiles in urban, rural, and alpine regions. In a first step, the compatibility with the available data must be ensured and tested across all Swiss regions. To allow broad application of the toolbox, additional charging strategies (induction, trolley, etc.) and energy sources (battery-assisted solar, fuel cells, etc.) will have to be implemented. Furthermore, the toolbox will be extended to incorporate further constraints, including regional limitations identified through accompanying research at other institutions. Lastly, computational efficiency needs to be improved to speed up the optimization process. The project spans 12 months, divided into a 6-month master’s thesis followed by a 6-month full-time scientific assistantship. To maintain continuity, both parts are ideally completed by the same person.
Goal
- Literature Review & Data Compatibility – Review existing research on electric bus fleet optimization and ensure compatibility of the toolbox with available Swiss regional data.
- Expansion of Charging Strategies & Energy Sources – Implement additional charging methods (e.g., induction, trolley) and integrate alternative energy sources (e.g., battery-assisted solar, fuel cells).
- Optimization & Constraint Integration – Extend the toolbox to incorporate regional constraints and operational limitations identified through external research collaborations.
- Computational Efficiency Improvement – Enhance the toolbox’s performance to accelerate optimization processes and enable real-time feasibility analysis.
- Documentation & Validation of Results – Systematically document enhancements, validate results through case studies, and ensure usability for future applications.
Contact Details
Mohammad Moradi, ML H 42.1, moradim@ethz.ch
More information
Published since: 2025-02-19
Organization Research Onder
Hosts Moradi Mohammad
Topics Engineering and Technology
Efficient Sampling-based GP-MPC for autonomous robots
Most control methods operate under the assumption of a known model. However, in practice, knowing the exact dynamics model a priori is unrealistic. A common approach is to model the unknown dynamics using Gaussian Processes (GPs) which can characterize uncertainty and formulate a Model Predictive Control (MPC) type problem. However, it is difficult to exactly utilize this uncertainty characterization in predictive control. In a recent approach [1], we proposed a sampling-based robust GP-MPC formulation for accurate uncertainty propagation by sampling continuous functions. In contrast, in the proposed project, you will implement an approximation method for sampling continuous functions using a finite number of basis functions [2] and solve the MPC problem jointly with the sampled dynamics. You will analyze the trade-offs between performance, approximation accuracy, and computational cost for this method.
Keywords
Gaussian Processes, model predictive control (MPC), Issac sim simulator, uncertainty propagation, Algorithms
Labels
Semester Project , Master Thesis
Description
See the attached pdf
Goal
See the attached pdf
Contact Details
If you are interested, please contact Manish Prajapat, Amon Lahr and Johannes Köhler {manishp, amlahr, jkoehle} @ethz.ch.
More information
Published since: 2025-02-14 , Earliest start: 2025-02-16 , Latest end: 2025-10-31
Organization Research Zeilinger
Hosts Prajapat Manish
Topics Engineering and Technology
Strategic Interactions of Future Mobility Systems

Mobility is typically self-optimized for a particular region to accommodate internal travel needs. However, as soon as one considers multiple, interacting regions (e.g., urban areas interacting with agglomerations, and agglomerations interacting with rural areas), important coordination issues occur, including scheduling mismatches, fleet allocations, and congestion peaks. In short, a mobility system composed of self-optimized mobility systems seems to often operate suboptimally. In this project, we will investigate the idea of strategic interactions of future mobility stakeholders across heterogeneous regions, such as urban areas, agglomerations, and rural areas, leveraging techniques from network design, optimization, game theory, and policy making.
Keywords
Optimization, Game theory, Multi-agent interactions, Transportation systems, Robotics
Labels
Semester Project , Master Thesis
Description
Task:
1) Literature review on the co-design of mobility systems
2) Design a methodology framework for strategic interactions of mobility stakeholders, leveraging techniques from game theory, optimization, and policy making.
3) Conduct real-world case studies targeted to future Swiss scenarios.
Skills Required
Programming, game theory, mathematics, optimization, machine learning, simulation
References
[1] Zardini, G., Lanzetti, N., Belgioioso, G., Hartnik, C., Bolognani, S., Dörfler, F., & Frazzoli, E. (2023). Strategic Interactions in Multi-modal Mobility Systems: A Game-Theoretic Perspective.
[2] Zardini, G., Lanzetti, N., Guerrini, L., Frazzoli, E., & Dörfler, F. (2021). Game theory to study interactions between mobility stakeholders.
Goal
Contact Details
If you're interested in this project, do not hesitate to reach out!
Please send your resume/CV, transcript of records and a short description of your interests and skills via email to [minghe@ethz.ch].
More details about my research: https://mingjia-he.github.io/
More information
Published since: 2025-02-07 , Earliest start: 2024-11-10 , Latest end: 2025-12-31
Applications limited to ETH Zurich
Organization Research Frazzoli
Hosts He Mingjia
Topics Mathematical Sciences , Information, Computing and Communication Sciences , Engineering and Technology
Vision-based Autonomous Racing with F1Tenth Car
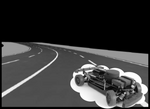
In this semester thesis, our goal is to enable an F1Tenth car, an autonomous vehicle at 1:10 scale of a Formula 1 car, to race safely on a track that is perceived through RGB-D images captured by an onboard camera.
Keywords
vision-based control, autonomous racing, image processing
Labels
Semester Project
Description
In this semester thesis, our goal is to enable an F1Tenth car, an autonomous vehicle at 1:10 scale of a Formula 1 car, to race safely on a track that is perceived through RGB-D images captured by an onboard camera. The lane detection system must be lightweight to ensure real-time performance, as it provides a reference for the controller. Furthermore, the controller must ensure the car's safety on the track while effectively handling potential challenges caused by perception inaccuracies. The performance of the proposed method will be validated through hardware testing.
Goal
Our objective is to enable the F1Tenth car to autonomously race on an unknown racing track by perceiving the lane markings through an onboard camera. This thesis focuses primarily on the development of the control module that can be combined with the existing perception stack.
We aim to achieve this objective through the following tasks:
- Setting up the existing perception stack for centerline detection and potentially fine tuning it for the specific experiment setup
- Implementing the method that combines several consecutive centerline estimates into a road map
- Implementing a controller that uses the road map as a reference
- Testing the performance of the method on F1Tenth car
Qualifications:
- Experience with Python
- Experience with implementing model predictive control methods
- Basic knowledge of computer vision and image processing
- Interest in robotics and hardware applications
Contact Details
To apply for this semester thesis, please send your resume and transcript to Jelena Trisovic (tjelena@ethz.ch).
More information
Published since: 2025-01-31 , Earliest start: 2025-01-15
Organization Research Zeilinger
Hosts Trisovic Jelena
Topics Engineering and Technology
Robust predictive control for safe and optimal control of nonlinear uncertain systems
This project aims to improve the design of predictive controllers that robustly ensure safe operation for a large class of uncertain nonlinear systems.
Keywords
Model predictive control, robust control, nonlinear systems, learning-based control
Labels
Master Thesis , ETH Zurich (ETHZ)
Description
Goal
Contact Details
Dr. Johannes Köhler, jkoehle@ethz.ch
More information
Published since: 2025-01-27
Organization Research Zeilinger
Hosts Köhler Johannes
Topics Mathematical Sciences
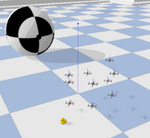
Teaching a robot to master a board game using Reinforcement Learning
Updated Project Description Our research project explores how physical robots can learn to play board games via Reinforcement Learning (RL). We currently employ OpenAI Gym environments with Stable Baselines3 to train an agent directly on our 2D gantry robot hardware integrated with ROS2. In parallel, we leverage NVIDIA’s Isaac Gym for a high-fidelity simulation environment, which allows us to iterate on policies before transferring them to the real robot. A key focus of the project is bridging the sim-to-real gap and reducing the time required for on-hardware training using sophisticated RL techniques. We explore multiple RL approaches—both in simulation and on physical hardware—to investigate robust policy learning strategies. RTX 4090 GPUs back these trainings. The project offers a unique opportunity to design, refine, and deploy RL algorithms in a real-world setting. We seek students to help improve our existing software and hardware pipelines by experimenting with various RL methods. The ultimate goal is to enable the robot to excel at board games against human opponents and other learned agents, showcasing advanced capabilities in real-world reinforcement learning.
Labels
Semester Project , Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
This project is set to limited visibility by its publisher. To see the project description you need to log in at SiROP. Please follow these instructions:
- Click link "Open this project..." below.
- Log in to SiROP using your university login or create an account to see the details.
If your affiliation is not created automatically, please follow these instructions: http://bit.ly/sirop-affiliate
More information
Published since: 2025-01-27 , Earliest start: 2024-08-15
Organization Research D'Andrea
Hosts Ramachandran Aswin
Topics Engineering and Technology
AI-Supported Energy Management Optimization for Hybrid Ships

This thesis explores advanced energy management for hybrid ships using Dynamic Programming (DP) and Model Predictive Control (MPC). It integrates Long Short-Term Memory (LSTM) models aiming to improve load forecasting, energy demand prediction, and operational optimization, with a focus on real-world constraints and maritime applications.
Keywords
Machine learning, Hybrid Ships, Hybrid vessels, Energy Management Systems, Dynamic Programming (DP), Model Predictive Control (MPC), Long Short-Term Memory (LSTM)
Labels
Master Thesis
Description
This master thesis focuses on advancing energy management systems for hybrid ships through the application of Dynamic Programming (DP) and Model Predictive Control (MPC). A key aspect of this research involves integrating Long Short-Term Memory (LSTM) models into DP and MPC frameworks while providing enhanced predictive capabilities for system load forecasting, energy demand estimation, and operational decision-making. As part of an interdisciplinary team, you will contribute to the development of an optimization toolbox tailored to maritime energy management.
Goal
The following tasks must be tackled during the study: 1. Literature review on the state-of-the-art in maritime energy management. 2. Development of DP- and MPC-based Algorithms for optimizing hybrid ship energy usage. 3. Cost function definition for ship energy consumption, considering the real-world constraint. 4. Integration of LSTM models within DP and MPC frameworks for enhanced prediction and control. 5. Documentation of the results.
Contact Details
Markus Wenig, ML H 42.1, E-Mail: mwenig@ethz.ch Mohammad Moradi, ML H 42.1, E-Mail: moradim@ethz.ch
More information
Published since: 2025-01-20 , Earliest start: 2025-01-20
Organization Research Onder
Hosts Moradi Mohammad
Topics Engineering and Technology
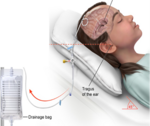
Hardware-in-the-Loop Testing of Cerebrospinal Fluid Shunt Systems for Hydrocephalus Patients

Hydrocephalus is a medical condition characterized by the disturbed dynamics of cerebrospinal fluid (CSF) and its excessive accumulation in the brain ventricles. In contemporary therapy, a shunt system is implanted that drains CSF from the ventricles into the peritoneal space. While various types of shunt systems exist, they are essentially all based on passive mechanical pressure valves that are driven by the external pressure gradient. This limits the efficacy of these shunts and complications such as over- and underdrainage may occur. To improve the therapy of hydrocephalus, we are working towards intelligent mechatronic shunt systems that are capable of monitoring vital signs and adapting CSF drainage according to the patient’s actual needs. In this project, you will support the technical upgrade of an existing hardware-in-the-loop test bench that is used for the evaluation of existing shunt systems and the development of smart shunt system.
Keywords
Estimation and Control, Mechatronic Systems
Labels
Student Assistant / HiWi
Description
Goal
Contact Details
More information
Published since: 2025-01-14 , Earliest start: 2025-01-15
Applications limited to ETH Zurich
Organization Research Zeilinger
Hosts Flürenbrock Fabian
Topics Mathematical Sciences , Engineering and Technology
Online Learning of Dynamic Control for Soft Manipulators
This project aims to develop an online learning framework for achieving precise position control of a soft robotic arm while adapting to time-varying system dynamics.
Keywords
online learning, distribution shift, soft robotics, position control
Labels
Master Thesis
Description
Soft robots offer notable advantages over rigid robots in terms of flexibility and compliance, which facilitate safe and robust interactions with environments. These characteristics make them ideal for diverse applications, such as medical contexts and bionic robotics. However, due to the absence of precise models and the time-varying nature of their system dynamics, achieving optimal control performance on soft robots remains a significant challenge. With the rapid development of machine learning, we now have various learning-based methods to achieve precise pose control of soft robots [4]. Nevertheless, in practice, we have found that the (off-line) well-trained control policies often become ineffective upon deployment due to time-varying system dynamics, which lead us to rethink the traditional “sampling-training-deployment” paradigm in machine learning.
The rise of online learning can effectively enable models to adapt to changing system dynamics. Recent studies have shown that in online learning, even when using an approximate (or even linear) model, it is possible to ensure a sublinear convergence of the regret [2]. Additionally, online learning demonstrates high learning efficiency and stability in both simulations and complex real-world systems.
In this project, we will adopt gradient-based stochastic online learning to achieve precise pose control of a soft manipulator [1,3]. The cable-driven soft robot arm comprises three independent modules (about 0.2m for each module), and each module is actuated independently with three cables. More details of the robot setup, such as structural and mechanical description, can be found in our previous work [3]. We will first establish an approximate model of the system, then learn both feedforward and feedback controllers in an online manner, which enable the soft arm to perform a series of acrobatic demonstrations. Finally, we will compare our approach with some existing offline control algorithms to evaluate the performance in terms of learning efficiency, handling distribution shifts, and tracking accuracy.
Reference
[1] Chen, Z., Guan, Q., Hughes, J., Menciassi, A. and Stefanini, C., 2024. S2C2A: A Flexible Task Space Planning and Control Strategy for Modular Soft Robot Arms. arXiv preprint arXiv:2410.03483.
[2] Ma, H., Zeilinger, M. and Muehlebach, M., 2024. Stochastic Online Optimization for Cyber-Physical and Robotic Systems. arXiv preprint arXiv:2404.05318.
[3] Guan, Q., Stella, F., Della Santina, C., Leng, J. and Hughes, J., 2023. Trimmed Helicoids: An Architectured Soft Structure yielding Soft Robots with High Precision, Large Workspace, and Compliant Interactions. npj Robotics, 1(1), p. 4.
[4] Bern, J.M., Schnider, Y., Banzet, P., Kumar, N. and Coros, S., 2020. Soft Robot Control with A Learned Differentiable Model. International Conference on Soft Robotics, pp. 417-423.
Goal
Work packages
Stage 1 - Preparation
- Literature review on state-of-the-art work learning-based methods for soft robotics
- Identify a rough (differentiable) model for the soft manipulator, e.g. system identification in the frequency domain, data-driven method
- Setup the motion capture system for tracking the posture of the soft manipulator
Stage 2 - Combine online learning & soft arm
- Implement iterative learning control (ILC) for the soft manipulator to track a single fixed given reference trajectory
- Implement stochastic online learning method for tracking any reference trajectories (in the workspace of the soft manipulator)
Stage 3 - Analysis & demonstrations
- Quantify the control performance, and compare to a baseline (e.g. an offline trained controller)
- Perform some acrobatics using the soft manipulator for demonstration
Contact Details
Qinghua Guan, qinghua.guan@epfl.ch, EPFL
Hao Ma, haomah@ethz.ch, ETHZ
Cheng Pan, cheng.pan@epfl.ch, EPFL
To apply, please include a short motivation for this project, as well as a copy of your CV and transcripts.
More information
Published since: 2025-01-08 , Earliest start: 2024-11-07 , Latest end: 2025-08-01
Organization Research Zeilinger
Hosts Ma Hao
Topics Engineering and Technology
Digital Twin for Spot's Home
MOTIVATION ⇾ Creating a digital twin of the robot's environment is crucial for several reasons: 1. Simulate Different Robots: Test various robots in a virtual environment, saving time and resources. 2. Accurate Evaluation: Precisely assess robot interactions and performance. 3. Enhanced Flexibility: Easily modify scenarios to develop robust systems. 4. Cost Efficiency: Reduce costs by identifying issues in virtual simulations. 5. Scalability: Replicate multiple environments for comprehensive testing. PROPOSAL We propose to create a digital twin of our Semantic environment, designed in your preferred graphics Platform to be able to simulate Reinforcement Learning agents in the digital environment, to create a unified evaluation platform for robotic tasks.
Keywords
Digital Twin, Robotics
Labels
Semester Project , Master Thesis
Description
Goal
Contact Details
Requirements: experience with a Python deep learning framework, understanding of 3D scene and camera geometry.
Please send us a CV and transcript.
Dr. Hermann Blum (blumh@ethz.ch) Dr. Zuria Bauer (zbauer@ethz.ch) Tifanny Portela (tportela@ethz.ch) Jelena Trisovic (tjelena@ethz.ch)
More information
Published since: 2024-12-17 , Earliest start: 2025-01-05
Applications limited to University of Zurich , ETH Zurich , EPFL - Ecole Polytechnique Fédérale de Lausanne
Organization Computer Vision and Geometry Group
Hosts Blum Hermann , Portela Tifanny , Bauer Zuria, Dr. , Trisovic Jelena
Topics Information, Computing and Communication Sciences
Design a Storytelling Map for Transport Network Design in Multi-regions
Transport networks in neighboring regions are interconnected, meaning that for interregional trips, the utilization of transport services is influenced by both networks rather than a single one. We propose a cooperative transport planning framework, highlighting the benefits of co-investment and payoff sharing. To effectively engage decision-makers, it is crucial to analyze cooperative strategies and demonstrate the impact of negotiations using advanced visualization techniques. In this project, we want to design and develop an interactive storytelling map that can help explain the impact of cooperation on environmental sustainability, transport affordability, and public transport profitability. The storytelling map will explain the background, visualize the different transportation network plans, and further show the impact on transportation operators and passengers.
Keywords
Storytelling Map, User-friendly web-based application, Graphic user interface design, Transport Network.
Labels
Semester Project , Internship
Description
You will take the lead in selecting visualization methods and developing a user-friendly web-based application. Your project will be comprised of the following work packages:
- Literature research
- Data preparation, e.g., data transformation, aggregation
- Graphic user interface design and development: including storytelling framework, maps, layout, color scheme, and map interaction
- Interface evaluation (optional): conduct user studies to assess the usability
Pre-Requisites (or strong interests in)
- Programming in JavaScript and Python
References
- Storytelling with Maps on Paper and Screen. https://storymaps.arcgis.com/stories/8dc1ba3373fc434bbf17a46d1b23d88b
- Public Transit in ArcGIS. https://storymaps.arcgis.com/stories/b0042dc5d3b04fe29951df8c5210bfb1
Goal
Contact Details
Dr. Chenyu Zuo, zuoche@ethz.ch Mingjia He, minghe@ethz.ch
To apply for this project, please send your CV and your transcript of records to the supervisors.
More information
Published since: 2024-12-16 , Earliest start: 2025-02-01 , Latest end: 2025-05-31
Organization Research Frazzoli
Hosts Zuo Chenyu, Dr , He Mingjia
Topics Information, Computing and Communication Sciences , Engineering and Technology
Monitoring and prediction for neuro-intensive care
Delayed cerebral ischemia (DCI) occurs in up to one third of patients with treated aneurysmal subarachnoid hemorrhage. Due to the lack of a reliable biomarker in the clinic, timely detection of DCI is currently highly challenging. In fact, its onset is often missed despite the multimodal monitoring in intensive care, with severe consequences for the patient: Secondary infarctions may lead to severe disability or even death. This project aims at developing a novel bedside measurement system to monitor and predict the risk for DCI in the hospital, filling the current diagnostic gap.
Keywords
Biomedical engineering, clinical data analysis, system modeling, state estimation
Labels
Semester Project , Master Thesis
PLEASE LOG IN TO SEE DESCRIPTION
This project is set to limited visibility by its publisher. To see the project description you need to log in at SiROP. Please follow these instructions:
- Click link "Open this project..." below.
- Log in to SiROP using your university login or create an account to see the details.
If your affiliation is not created automatically, please follow these instructions: http://bit.ly/sirop-affiliate
More information
Published since: 2024-12-03 , Earliest start: 2025-01-10 , Latest end: 2025-12-19
Organization Research Zeilinger
Hosts Heim Marco
Topics Engineering and Technology
Error bounds for scalable Gaussian process regression

The goal of the project consists in deriving error bounds for the approximate Gaussian process regression method given by the FITC method.
Keywords
Gaussian processes, uncertainty bounds
Labels
Semester Project , Master Thesis
Description
See attachment
Goal
Contact Details
Dr. Anna Scampicchio, ascampicc@ethz.ch
More information
Published since: 2024-12-02
Organization Research Zeilinger
Hosts Scampicchio Anna
Topics Engineering and Technology
Error bounds for Regularized Trigonometric Regression in the Multi-task setting

Multi-task learning is the problem of jointly learning multiple functions that are “related” to each other. By leveraging this similarity, estimation performance can be improved on each (possibly unseen) task, and one can make an efficient use of the available data. The project aims at deriving uncertainty bounds around the multi-task-system estimates. Specifically, the candidate will work with the regularized trigonometric regression inspired by the so-called sparse-spectrum Gaussian process regression, investigate the issue of bias learning (i.e., finding the features that encode similarity among tasks) and derive error bounds for it, possibly setting the analysis in the statistical learning framework.
Keywords
statistical learning, multi-task learning, uncertainty bounds
Labels
Semester Project , Master Thesis
Description
see attachment
Goal
see attachment
Contact Details
Dr. Anna Scampicchio, ascampicc@ethz.ch
More information
Published since: 2024-12-02
Organization Research Zeilinger
Hosts Scampicchio Anna
Topics Engineering and Technology
Direct Projects
Custom Projects
From time to time, project supervisors will develop custom student research projects to fit with a student's particular interests or skills.
If you are interested in doing a custom student research project, please email the project supervisor of your choice directly. We recommend that you carefully review their area of research before you contact them.
Please note that the decision of whether to develop a custom student project is at the full discretion of the project supervisor.